< backMachium - The ARM "Apple Silicon" Debugger
Let's build a debugger for iOS
December 9, 2021Introduction
Honors projects are an excellent excuse to complete projects that have been sitting on a to-do list for a while. After all, when you're given an excuse to make anything, why not take the opportunity to build what you want?
My mind immediately went to a project I've wanted to create for a while. I've used debuggers a million times, but I never really understood how they worked. Of course, it's easy to just google "how do debuggers work", but that's not really fun, is it? Also - I forgot to add an important detail. I wanted to know how ARM debuggers work, which is a lot more niche than debugging on x86. Wait, scratch that. I wanted to know how ARM debuggers work on iOS, or as Tim Cook would like you to say, debugging on Apple Silicon. Are there even any resources out there on the internet to help with that? Let's find out and take a trap filled journey (pun intended) into debugging Apple Silicon.
Part 1. Ignorance is Bliss
I won't lie to you - I had a general idea of how a debugger would be created when going into this project. I figured I could just
ptrace() my way through this entire project and add some memory writing / reading after I'm done.
Nothing is that easy though, and what's unfortunate is that I found that out wayyyyy too late into the process of making this project.
I let a few weeks pass and once I finally accomplished all "UI" features, I decided to work on the debugger. During that time, I came up with the name "Machium" which joins the name of the Mach microkernel and "brachium", meaning arm in Latin. Once I came up with the most important part of a project, the name, I went to work trying to build the debugger core. My immediate thought was to start playing around with
ptrace(PTRACE_ATTACH) and working from that function to access
registers, set breakpoints, and pause / continue the target process. My thinking process was quickly detoured and my dreams were squashed in the span of a few minutes due to an issue I found.
I googled "ptrace xnu" and found the documentation page for ptrace and discovered that the header for ptrace is
ptrace() couldn't be found.
I struggled with this problem for a few minutes and then stumbled across a StackOverflow article that revealed the bad news to me.
Apple, in their infinite wisdom, decided to remove ptrace() from the kernel. Yeah, Seriously. I have absolutely zero idea why they would remove ptrace() from the kernel,
so instead of using that function, I had to use a bunch of random APIs to achieve just part of what was possible through ptrace()
Part 2. Replacing ptrace()
If I try to explain the Mach part of the XNU kernel I'm going to be here for days writing this and I have only a few hours remaining to finish this project. That being said, most functions / terms inside of this write-up are able to be googled. The only thing that needs to be known is that Mach is an inter-process communication mechanism that uses "Mach Ports" to send and receive messages with other processes and the kernel.
Now that we've got that out of the way, let's start replacing
ptrace().
The first thing we need is the "inhertance" or control abilities of the caller.
Fortunately, there is one function that allows us to take control of a remote task, and that's task_for_pid().
When I say "take control" what I really mean is that the function will give us a Mach send right to the task port, allowing us essentially
to do whatever we want to the process.
task_for_pid(mach_port_t owned_task, pid_t pid, mach_port_t* remote_task) is loosely defined like this. (I couldn't find a formal definition, so I took some creative liberty with types)
Once the function is called, (check in Machium.c for an example) remote_task should contain a reference to the target task. Remote_task is what we'll be using throughout the entire debugger.
Great. We've got the ability to play God with a remote process, so now what? How does that help us with our need to read / write register and memory? Unfortunately, we'll need to use various Mach APIs to achieve this task. Let's start with reading and writing memory. After some digging, I was able to find the functions
vm_read_overwrite() and vm_write().
These two functions cover memory read/write in a specific task. For example usage and how I was able to create a wrapper for them, check Memory.c.
Using vm_read_overwrite() was fairly easy, but vm_write() was a bit more difficult.
I needed to use the vm_region_64() function to grab the memory protection information of the memory page where I'll be writing.
After that, I had to change the memory protection through vm_protect() to VM_PROT_READ | VM_PROT_WRITE | VM_PROT_COPY to write to to memory, and then reinstate
the stored protection.
Memory read/write was fairly easy to handle. The next task of reading / writing register values was much more difficult than expected. I realized a problem VERY quickly when trying to develop the register read/write functionality: the register values that were being read / written to were the debugger's current values, and not those of the target task. I found a creative solution to this problem, which just feels like a hack, but that's what's required when Apple tosses
ptrace() in the trash can.
Part 3. The Journey to Achieve Register Read / Write
Before revealing the solution to the problem described above, I'll explain how register read/write works. The function
task_threads() allows for an array of threads for a given task (in this case our debug task) to be returned.
Generally speaking, the first index in the array is the thread that is responsible for its main execution.
Since it is assumed the first thread is the most important one, it is what will be used for getting register states.
The function thread_get_state() allows for a set of registers to be returned for a given state.
It is important to note that the function input depends on your CPU architecture and desired register types, because
the kernel won't just sort that out for you. What we'll want returned are the ARM64 register states, defined in the struct behind the typedef arm_thread_state64_t
For the calling convention, here is an example ripped from the Machium project. The context behind the code is self explanitory, but comments are in Register.c if needed.
(thread_get_state(thread_list[0], ARM_THREAD_STATE64, (arm_thread_state64_t) &state, &state_count))
Once we call that function, we can now access each register through
state. Just remember, however, that the
contents of state are simply the register values at the time of its calling and don't change in real time. The thread state / register struct looks like this:
_STRUCT_ARM_THREAD_STATE64
{
__uint64_t __x[29]; /* General purpose registers x0-x28 */
__uint64_t __fp; /* Frame pointer x29 */
__uint64_t __lr; /* Link register x30 */
__uint64_t __sp; /* Stack pointer x31 */
__uint64_t __pc; /* Program counter */
__uint32_t __cpsr; /* Current program status register */
};
Source: https://opensource.apple.com/source/cctools/cctools-870/include/mach/arm/_structs.h
For example, if I wanted to read the value of x5, I would do
printf("0xllx", state.__x[5]). Writing to the registers is easy too, and can just be done through =.
After accessing and writing to the registers, thread_set_state() must be called for the change to take place. The calling convention is the same as thread_get_state()
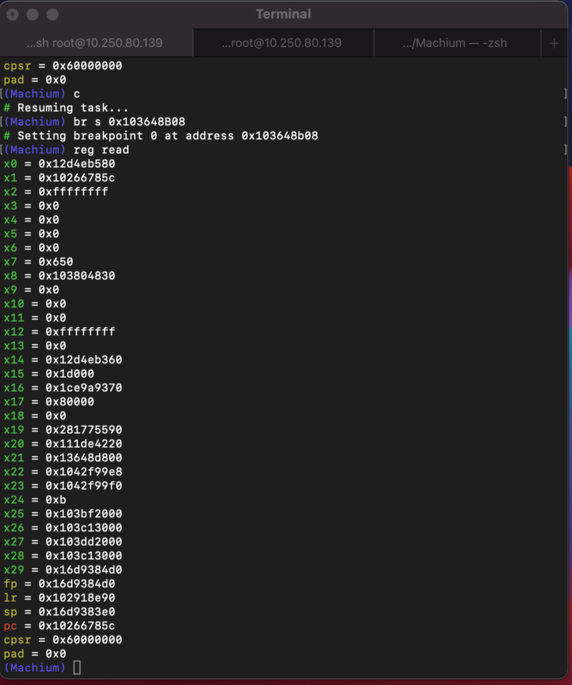
Don't worry, I didn't forget about the register access issue I described above. The solution to the active thread problem was much simpler than I anticipated, and I'm actually embarrassed how long it took me to figure out. Before and after
thread_get_state() and thread_set_state() are called, I call thread_suspend(thread_list[0]) and thread_resume(thread_list[0])
on the first index of the thread list, which in theory should always pause the main execution thread of the target task.
When they're paused and I call thread_get_state(), it'll return the last register values of the target task and not debugger code.
Part 4. Adding Breakpoints and Watchpoints
Almost every single debugger in existence has breakpoint / watchpoint functionality built into it, so I felt obligated to add it into Machium. The journey to adding breakpoints to the debugger was long and tedious, but it was rewarding to finally obtain break/watchpoint functionality. Let's start with setting breakpoints on ARM. How does that even work? Is it like x86?
Before showing my findings, I'll explain what hardware debugging looks on iOS. The code for obtaining debug registers is exactly the same as grabbing normal registers, but two things are changed. Instead of using the
arm_thread_state64_t type defined struct and ARM_THREAD_STATE64, we use arm_debug_state64_t and ARM_DEBUG_STATE64. The struct is defined as follows:
_STRUCT_ARM_DEBUG_STATE64
{
__uint64_t __bvr[16];
__uint64_t __bcr[16];
__uint64_t __wvr[16];
__uint64_t __wcr[16];
__uint64_t __mdscr_el1; /* Bit 0 is SS (Hardware Single Step) */
};
Source: https://opensource.apple.com/source/cctools/cctools-870/include/mach/arm/_structs.h
__bvr[16] and __wvr[16] are the respective breakpoint / watchpoint registers. In order to set them, the same process as above is followed.
The breakpoint registers should be set to an address in executable memory and the watchpoint registers should be set to a value in readable / writeable memory.
Once the set address in the breakpoint register is executed, a breakpoint exception will be raised and execution will be halted.
Similarly, once the memory address set in the watchpoint register is accessed or its content is changd, a watchpoint exception will be raised and execution will halt.
So what are the
__bcr[16] and __wcr[16] variables used for then? Those are used for enabling / disabling breakpoints and watchpoints.
After some digging through the ARM Debug Manual I was able to find the exact bits I needed to flip in order to enable a breakpoint.
I won't bore you will the details, but know that setting __bcr[] or __wcr[] to 0x1E1 will enable watchpoints and breakpoints.
If you want to disable the breakpoints or watchpoints, set the registers back to 0. Just know that each value in the array corresponds with its respective break/watchpoint,
so for example __bcr[3] must be set to the enable value in order for __bvr[3] to work.
There's one small detail that I didn't mention, however. Did you notice that there's 16 available debug registers? Yeah, that's a complete lie. For some reason, which is beyond my comprehension, only 6/16 debug registers actually work. Indexes 6-15 in the array do nothing if you set them to a memory value. Why? I have absolutely no idea, it's Apple logic, I guess.
The final step is catching breakpoints and watchpoints. There's two ways of accomplishing this task - using
signal() or task_set_exception_ports()
The easiest way of solving this problem is using signal() , but it requires one extra step. Compiling and linking a dynamic library to a target process that uses __attribute__((constructor)) to raise
signal(SIGTRAP, handler) before the main program runs will prevent crashing upon a hitting a break/watchpoint, but that's sloppy.
The other solution of using task_set_exception_ports() is much more elegant.
In order to use
task_set_exception_ports(), we start by allocating a mach port for the remote task using mach_port_allocate(). We give the mach port that we
created a receive right (MACH_PORT_RIGHT_RECEIVE) so it's able to catch the breakpoint / watchpoint exception.
Next, we use mach_port_construct() to construct a mach port with a send right (MPO_INSERT_SEND_RIGHT)
so we can build our exception server that will receive the Mach message containing the exception.
Lastly, we create the exception port using task_set_exception_ports() and set the exception flag to EXC_MASK_BREAKPOINT.
We're able to create a mach receiver port successfully because we have a send right to the remote task that we're debugging thanks to task_for_pid()!
For context and more detailed code, the function start_exception_server(Machium* machium) in Breakpoint.c shows this code to completion.
Part 5. Finishing Up
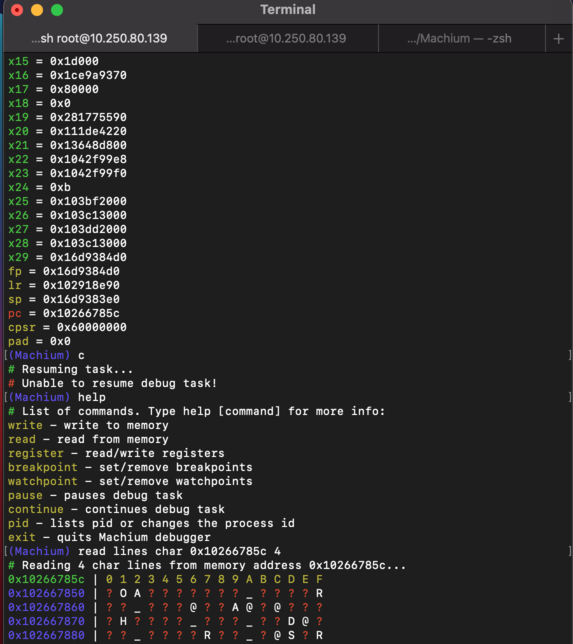
Almost everything is complete at this point. There's only a few things I didn't mention already in the write-up which are crucial to a debugger. First off, pausing and resuming the task is handled through
task_suspend(machium->debug_task) and task_resume(machium->debug_task).
It's very trivial so I didn't mention it earlier, but since pausing and resuming is a core part of a debugger I figured I would include it here at the end.
Next, the debugger needs to be compiled and run exclusively on ARM64. If you try to compile this debugger on x86, it won't work. There are ARM specific functions and structs used inside of Machium which prevent it from being compiled elsewhere. So, how do you compile for ARM64? It's easy, just find yourself a jailbroken iOS device or Apple Silicon Mac. You will need root to run Machium, which can be obtained much more easily on Mac than iOS (unless you have some kernel exploits at your dispoal).
Lastly, after Machium is compiled, it requires proper entitlements to run. In order to add entitlements to Machium, use
ldid and this entitlements XML file to sign it correctly.
Entitlements such as task_for_pid-allow are needed for debugging remote processes, unlocking task_for_pid() usage.
Almost all of Machium can be slightly modified and inserted into a dynamic library to run under a self task context, but that's not as useful.
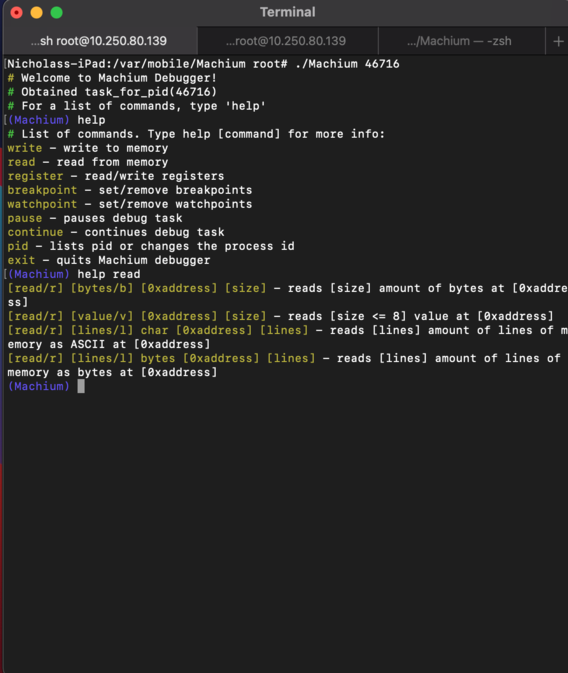
Finally, we've reached the end. In terms of using the debugger, if you have a device that can run Machium, run the debugger with the target process ID and it'll automatically attach. I was fortunately able to achieve most of what I wanted with this debugger, and I will most likely use this as a lightweight lldb replacement for my own work. In the future, instruction stepping can be added along with smart breaking to expand upon the 6 register limit, but that's not a problem for right now. Hopefully now that most of my programming bucket list is complete I can spend some time on iOS security research, which will be a journey much larger than Machium.
Thank you for reading, and if you are interested in Machium, the source code is linked at the top.
Images
Machium Source Code